|
My research interests lie in multi-robot coordination, SLAM, terrain classification, 3D mapping, and 3D representations of the environment. Put more simply, I am interested in autonomously creating all sorts of maps with one or more robots. Below you will find a short description of research topics I have worked on. Do not miss the videos! |
|
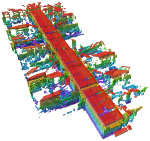
3D map representationsSeveral robotic applications require a 3D model of the environment. Such maps are necessary in many airborne, underwater, or extra-terrestrial missions but may also be relevant in domestic scenarios for mobile manipulation or for navigation in multi-level environments. Unfortunately, a widely used 3D mapping framework or map format did not exist in the robotics community. To this end, we designed and implemented a framework for 3D mapping, the OctoMap library. This light-weight, open-source library is based on octrees. It is very memory efficient and can easily be adapted to the needs of your project. It provides a compressed file format which allows for easy exchange of maps between robots and researchers. Details of the approach can be found in the OctoMap paper. |
|
Multi-robot CoordinationThe autonomous generation of maps of an environment with a team of robots is an interesting example of multi-robot coordination. The key problem in multi-robot exploration is to choose actions for the individual robots so that they simultaneously explore different areas of their environment. It is this exploration strategy which affects the efficiency of the robot team the most. We introduced a new online coordination strategy for multi-robot exploration which uses a segmentation of the already explored area. By assigning robots to segments instead of directly assigning them to frontier targets, the robots are distributed over the environment more effectively. This leads to a reduction of redundant work and the avoidance of interference between robots. As a result, the exploration time is significantly reduced. Details of the approach have been published in our IROS 2008 paper. Teams that consist of robots with different capabilities (speed, size, sensors, actuators, etc.) are called heterogeneous teams. Efficiently coordinating such teams requires advanced planning mechanisms. In a recent work, we considered teams where some robots are able to deploy and retrieve other (smaller) robots. We proposed a novel approach which integrates a temporal symbolic planner that explicitly considers deployment and retrieval actions with a traditional cost-based assignment procedure.
Details of the approach will be published
in our IROS 2010 paper. |


|
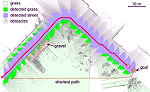
Terrain ClassificationWe developed a laser-based classification approach that is especially suited for detecting grass and other low vegetation you will typically find in parks or campus sites. We classify surface terrain based on the measured laser reflectivity of 3D laser data. Using our method, autonomous robots are able to navigate more safely and efficiently in outdoor environments. Details of the approach can be found in our IROS 2009 paper. |
|
SLAMBuilding maps autonomously, usually referred to as SLAM, is one of the fundamental tasks of mobile robots. We presented an approach that allows a mobile robot to use several different types of maps of the environment. At the example of a combination of feature-based models with occupancy grid maps we describe how a robot can perform the mapping process using multiple types of representation. It applies reinforcement learning to select the representation that is best suited to model the area surrounding the robot based on the current sensor observations and the state of the filter. Results of the project have been published in our ECMR 2007 paper and this article in Robotics and Autonomous Systems. |

|