|
2014-04 | | I am now in Bonn as the chair for
photogrammetry. |
|
2014-02 | | Our new DFG-funded BrainLinks-BrainTools project AdvancedEDC received funding. |
|
2014-01 | | I will organize a workshop at ICRA 2014 with Diego Tipaldi on "What Sucks in Robotics and How to Fix It - Lessons Learned from Building Complex Systems". |
|
2013-11 | | I accepted the offer of the University of Bonn for a full professor position. |
|
2013-10 | | We successfully finished our EU project First-MM after 3.5 years. Final review completed, done. |
|
2013-10 | | I will serve in the Program Committee for RSS 2014. |
|
2013-10 | | Our new EU project EUROPA2 has started. |
|
2013-10 | | Our new EU project STAMINA has started. |
|
2013-08 | | I will serve as an Associate Editor for ICRA 2014. |
|
2013-07 | | I received the Faculty Teaching Award 2012/2013 (Fakultätslehrpreis 2012/2013) |
|
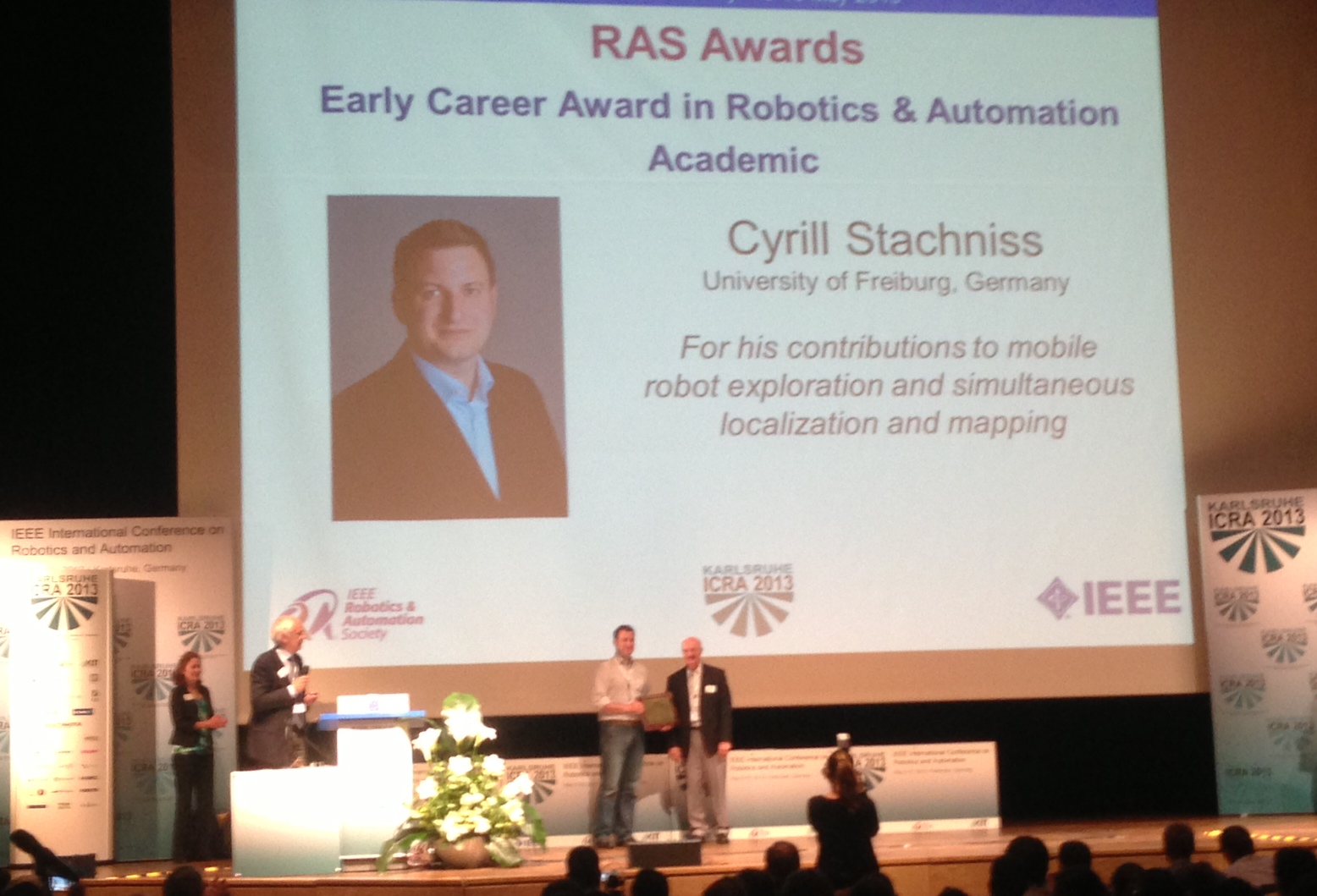
2013-05 | | I received the IEEE RAS Early Career Award at ICRA 2013. |
|
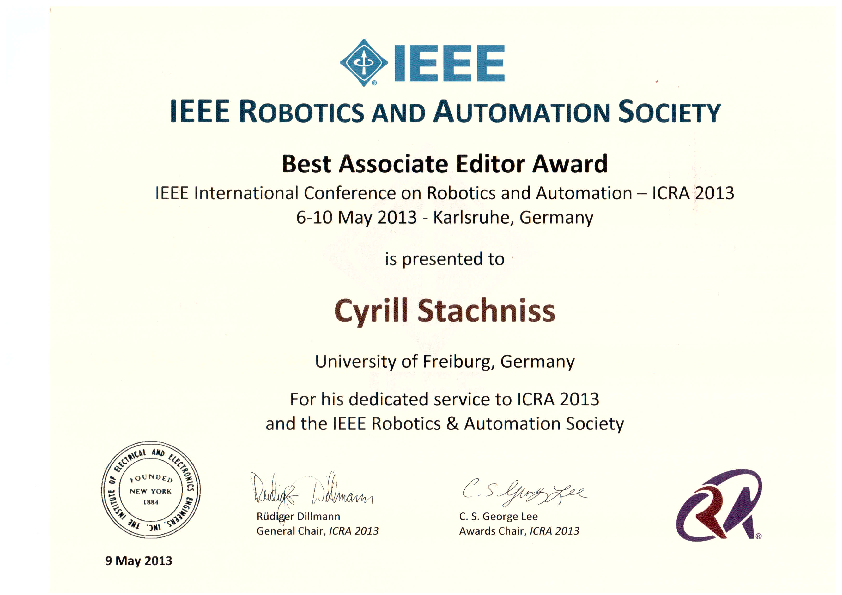
2013-05 | | I received the Best Associate Editor Award at ICRA 2013
(certificate). |
|
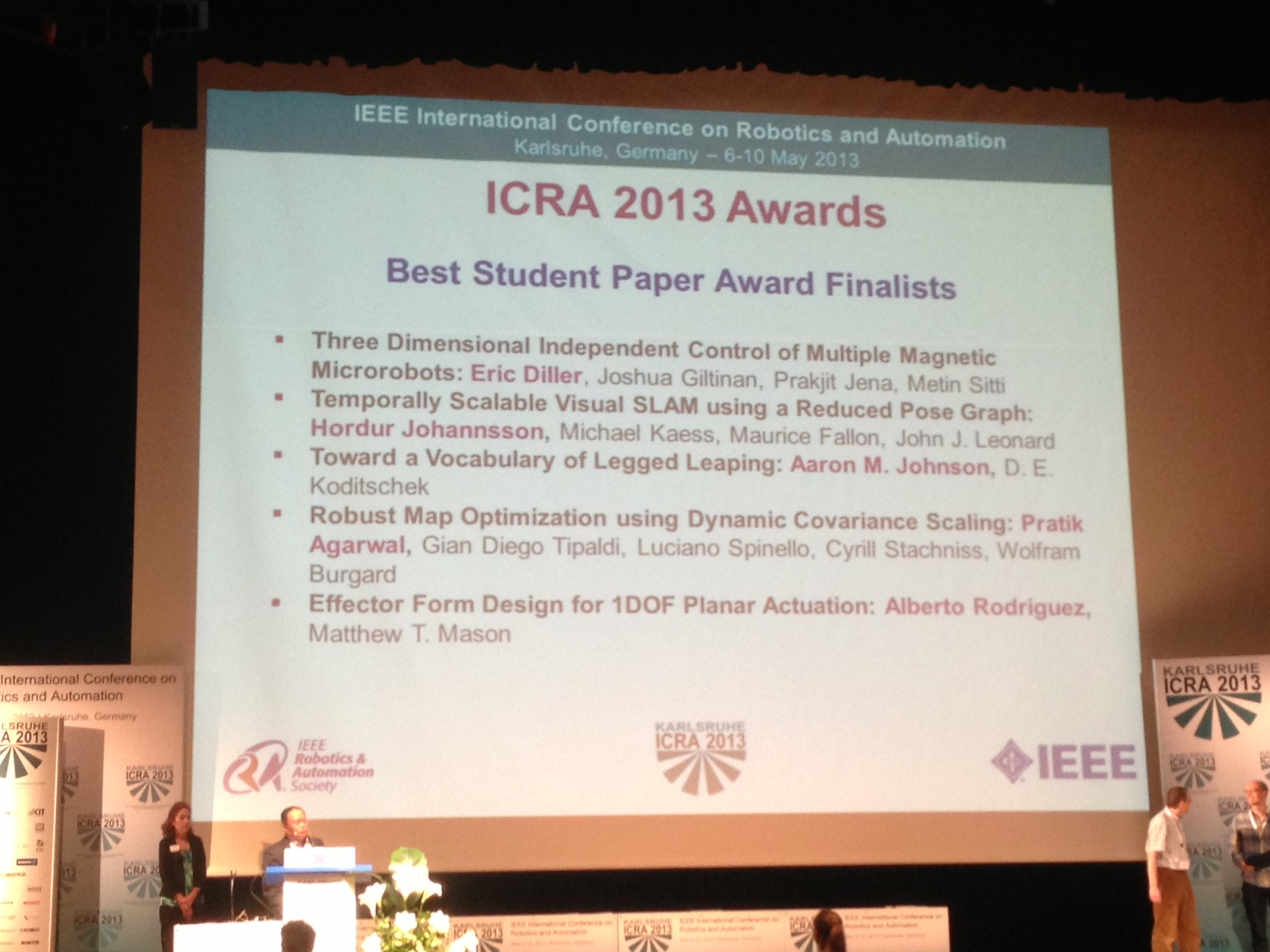
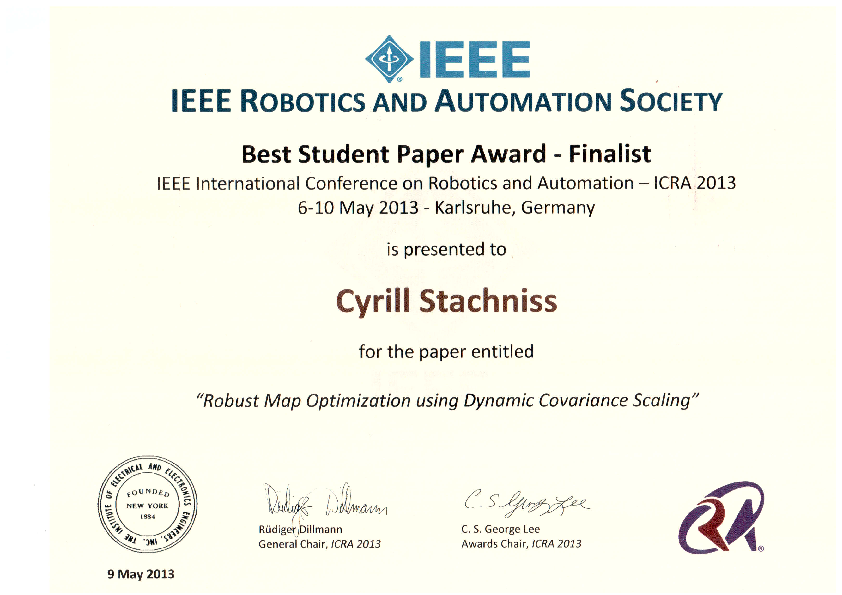
2013-05 | | Pratik's paper has been selected as an Best Student Paper Finalist at ICRA 2013
(certificate).
|
|
2013-05 | | Our robot Obelix will be at the EC booth during ICRA 2013 and will visit the Citizens Forum on May 10 in Karlsruhe. |
|
2013-05 | | Wolfram Burgard and I will be giving an invited Tutorial on Robotics: Probabilistic Methods for State Estimation and Control in September 2013. |
|
2013-04 | | I am co-organizing a RSS 2013 Workshop on Robotic Exploration, Monitoring, and Information Collection: Nonparametric Modeling, Information-based Control, and Planning under Uncertainty with G. Hollinger, S. Karaman, F. Ramos, M. Schwager, C. Tomlin, M. Vitus, and S. Williams. |
|
2013-03 | | The ROVINA project goes online. |
|
2013-03 | | I added most of my research videos as a Youtube playlist. |
|
2013-02 | | Our FP7 project ROVINA, which I am coordinating, started on Feb 1st. |
|
2013-01 | | I will receive the IEEE RAS Early Career Award 2013! See also UniFR press release. |
|
2012-10 | | The recordings of my SLAM Course are available via Youtube. |
|
2012-08 | | Our EUROPA robot Obelix successfully navigated through Freiburg downtown generating a lot of positive press coverage. |
|
2012-08 | | I will be IJCAI 2013 area chair for robotics. |
|
2012-08 | | EUROPA public event - our robot going to Freiburg downtown! |
|
2012-07 | | Our FP7-Call-9 proposal ROVINA has been evaluated with 15/15 points and will be funded by the EC. I will be coordinating the project and I am looking forward to great collaborations with researchers from KU Leuven, RWTH Aachen, La Sapienza Rome, Algorithmica.it, and ICOMOS. |
|
2012-07 | | I will serve as an Associate Editor for ICRA 2013. |
|
2012-06 | | I have been invited as a RSS 2012 early career spotlight speaker. |
|
2012-04 | | Our EU project EUROPA received an excellent evaluation in its final review meeting. |
|
2012-01 | | I will serve in the Program Committee for KI 2012. |
|
2011-12 | | I will serve in the Program Committee for ECAI 2012. |
|
2011-10 | | I will serve in the Program Committee for WAFR 2012. |
|
2011-09 | | I will serve as an Associate Editor for ICRA 2012. |
|
2011-09 | | I will serve in the Program Committee for IAS 2012. |
|
2011-08 | | I will serve as an Area Chair for Robotics: Science and Systems (RSS) 2012. |
|
2011-06 | | 4 out of 4 IROS'11 papers got accepted. |
|
2011-06 | | Our EU project First-MM has been reviewed successfully. |
|
2011-05 | | Our EU project EUROPA has been reviewed successfully. |
|
2010-11 | | Our SFB/TR-8 will be funded for another four years by the DFG! |
|
2010-11 | | I will be Program Chair for Spatial Cognition (SC) 2012. |
|
2010-09 | | I will be the Workshop Chair for Robotics: Science and Systems (RSS) 2011 held at USC in L.A. |
|
2010-07 | | I have been selected as a Microsoft Research Faculty Fellow (press release). |
|
2010-04 | | Our SLAM back-end HOG-Man has been released under L-GPL. |
|
2010-02 | | Our new EU project First-MM just started. |
|
2009-11 | | I successfully finished my habilitation. |
|
2009-10 | | The negotiations for the new EU project First-MM have been successfully completed. |
|
2009-10 | | I took over Wolfram's duties as a professor for the next year. |
|
2009-09 | | Our new FP7-IST EU project First-MM is currently under negotiations. |
|
2009-08 | | I will serve as an Area Chair for Robotics: Science and Systems (RSS) 2010. |
|
2009-08 | | I will serve as an Associate Editor for International Conference on Robotics and Automation (ICRA) 2010. |
|
2009-06 | | I am editing the JFR Special Issue on Visual Mapping and Navigation Outdoors together with Stefan Williams and Jose Neira. |
|
2009-05 | | My book Robotic Mapping and Exploration has been published by Springer. |
|
2009-04 | | Our new RSS paper on LDA-based discovery of object classes has been accepted. |
|
2009-04 | | Our proposal for a new EU project has been submitted. |
|
2009-03 | | Our IJCAI paper has been accepted. |
|
2009-03 | | Our new EU project EUROPA
starts. |
|
2008-11 | | Our ICRA'09
workshop on Visual Mapping and Navigation in Outdoor Environments
organized by Jose Neira, myself, and Stefan Williams has been accepted
and will take place on the 12th of May 2009 in Kobe (Japan). |
| 2008-07 | | I became Associate Editor for "Reactive and Sensor-Based Planning" for the
program committee of IEEE International Conference on Robotics & Automation (ICRA). |
| 2008-07 | |
Our proposal for a new EU project called EUROPA in the call for "Cognitive Systems, Interaction, and Robotics" is the highest ranked propsal among all STREPs and IPs. |
| 2008-07 | | I became Associate Editor of the IEEE Transactions on Robotics (T-RO). |
| 2008-03 | | I received the 7th EURON Georges Giralt Award for the best robotics thesis defended in Europe in 2006! |
| 2008-01 | | New version of our Tree-based netwORk Optimizer (TORO) has been released (fixes a convergence problem in 3D). |
| 2008-01 | | I am in the program committee of the
AAAI Conference on Artificial Intelligence (AAAI) 2008 (PGAI). |
| 2007-12 | | I am in the program committee of the
International Conference on Informatics in Control, Automation & Robotics (ICINCO) 2008. |
| 2007-10 | | I am in the program committee of Robotics: Science and Systems (RSS) 2008. |
| 2007-09 | | Download the tutorial slides on RBPF-SLAM presented at the ECMR'07. |
| 2007-08 | | I am in the program committee of Autonomous Agents and Multiagent Systems (AAMAS) 2008. |
| 2007-05 | | First release of our new Tree-based netwORk Optimizer (TORO). |
| 2007-05 | | I am in the program committee of the Embedded Systems and Robotics track on the 23rd Annual ACM Symposium on Applied Computing |
| 2007-01 | | OpenSLAM.org is now online! |
| 2007-01 | | I am in the program committee of the International Conference on Robot Communication and Coordination
(ROBOCOMM) 2007 |
| 2006-12 | | I am in the program committee of the International Conference on Advanced Robotics (ICAR) 2007 |
| 2006-11 | | Our SFB/TR-8 has been approved for 4 additional years of funding |
| 2006-11 | | I moved from Zurich to Freiburg |
| 2006-10 | | I received the Wolfgang-Gentner-Award for my PhD thesis |
| 2006-09 | | I am publicity chair and publication chair of Robotics: Science and Systems (RSS) 2007 |
| 2006-09 | | Local arrangement for the IEEE/ASME International Conference on
Advanced Intelligent Mechatronics (AIM) 2007 in Zurich |
| 2006-09 | | I am in the program commitee of the European Conference on Mobile Robots (ECMR) 2007 |
| 2006-04 | | I moved to Zurich (ETH Zurich, IRIS, ASL) |
| 2006-04 | | PhD defense - summa cum laude |
| 2006-01 | | I submitted my PhD thesis |
| 2005-12 | | CARMEN integration meeting in Boston |
| 2005-12 | | I am responsible the conference management system of Robotics: Science and Systems (RSS) 2006 |
| 2005-08 | | I received the IROS/ICASE best paper award on application |
| 2005-04 | | Finalist - ICRA 2005 best student paper |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}